
The AECC is dedicated to advancing global network architectures and computing infrastructure to address the data transfer requirements of the growing connected car services ecosystem. Our Proof of Concept (PoC) program focuses on real-world demonstrations showcasing AECC solutions’ efficacy in managing expanding data needs.
Contributing a PoC proposal is a great way to get involved with the AECC and our work in helping to shape the future of the global connected vehicle ecosystem. Any company can take part in our PoC program if at least one member company is part of the resulting PoC proposal. Explore our proposal library to see how AECC addresses current challenges in the connected vehicle realm.
If you’re interested in participating in a PoC proposal, please reach out to [email protected]
AECC Proof of Concept
Enabling a Geolocation Parking Service with AECC Distributed Edge Architecture
By KDDI Corporation, Nexar Inc., and Oracle Japan Corporation
Abstract
This Proof of Concept sought to confirm the AECC’s hierarchal architecture approach to enable a dynamic location-based parking service. The test aimed to prove the service could reliably find free parking spaces along street sides in a Tokyo, Japan business district by using real-time vision and geospatial data from vehicles moving through two areas served by different edge clouds. In addition to detection and reporting capabilities, the test also sought to verify that the communication path between a car and edge clouds can be dynamically switched based on a car’s geographic location without requiring cached high latency resolution interruption or data concentration infrastructure. The test succeeded on both counts, providing proof of the AECC’s concept for scaling mobility services using existing edge and cloud infrastructure.
Business Strategy
Finding free street parking was the primary use case for the geolocation service featured in this Proof of Concept. The collaborators for this test aimed to use what they had – i.e., conduct the process using regular cars with standard cameras for visual data collection, mobile network connectivity via two existing edge networks, and a standard commercial cloud service for vision AI processing and data analytics. This strategy avoided purchasing and installing supplemental roadside gear to keep costs low, which would be attractive to any manufacturer, mobile network operator or service provider intending to massively scale connected car geolocation services and dynamic mapping.
Proof of Concept Objective
Contributors for this Proof of Concept designed the test to demonstrate functionality of a geolocation parking
service and related points:
- Deploy multiple technologies from vision AI to understand what car cameras see and selectively upload
images of interest – specifically, free parking spaces in a congested big city business district. - Demonstrate the process by which vehicle detections captured through different drive-by points of view
are converted to ongoing tracked road or curb condition and tracked and acted upon over time. - Show that vehicles producing raw vision data and consuming consolidated information will not be
confused by the distributed processing, or by rearranging processing based on time of day or local street
loads. - Confirm the geolocation parking service works without interruption despite vehicles crossing processing
boundaries, and without compromising geoprivacy of vehicles uploading and subscribing to services. - Prove that the vision AI technology can scale to process uploads from many vehicles at the same time to
deploy a reliable commercial geolocation service and dynamic mapping for intelligent driving.
Testing the Geolocation Parking Service
Using the AECC Distributed-Edge Architecture
The highest cost of a geolocation service is network transmission of data. A well-implemented geolocation service at scale selectively uploads and consolidates media and metadata from vehicles to contain costs while improving service quality. For example, the AECC architecture employs a distributed edge to speed processing and reduce locally produced data and to minimize unnecessary transmission of that data to and from the cloud data centers and back to connected vehicles. It also ensures there is no need to centrally join location data of millions of vehicles with location data of thousands of transient conditions. Centralization of these frequent billions of computations is infeasible and instead delegated to edge geolocation channels. The diagram below shows the architecture used for this Proof of Concept.
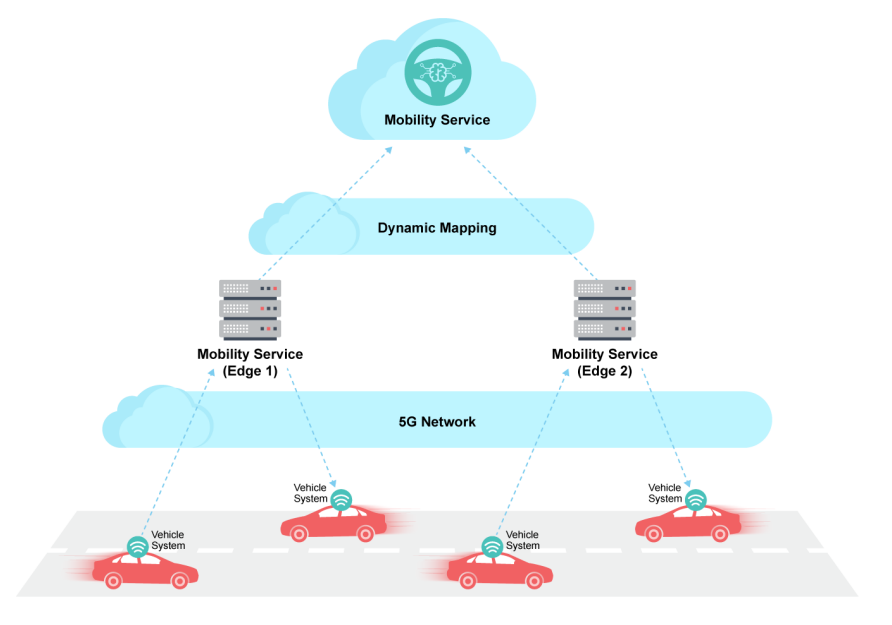
AECC Geolocation Service Open Architecture
Geospatial Edge Processing and Interoperability for Testing
Edge processing elements. The test cars provided crowd sourcing of visual data for free parking spaces; similar data could support other use cases such as HD Map fresh change detection, roads, and signage. The Proof of Concept geolocation service used these data to provide test cars with Intelligent Driving heads-up push notification alerts on free parking spaces, but related services could also send alerts for hazards and abstractions, charging stations, and other targets of interest on route. A service could also provide Cruise Assist streamlined traffic flows, scheduling, and AV support.
Open architecture. The Proof of Concept’s AECC architecture eliminated dependencies on specific providers within each cloud, edge access network, and services domain. The testbed included Nexar’s dash cam equipment, KDDI’s mobile network, Oracle’s two edge servers for pre-processing, and a global commercial cloud service to host processing for vision AI and other elements of the geolocation parking identification service. But any commercial standards-based element could be swapped in or out of the AECC architecture depending on requirements.
Positioning via shards and tiles. Given the test was in a large city, geolocation processing associated locations within smaller shards or areas within a grid. Shards were dynamically mapped to compute locations based on road activity. Smaller grids or tiles (1 meter) enabled location information precise enough to evaluate availability of a parking space.
Implementation of high scalability. The test used a standards-based interface for transient event management. It allowed creation of a virtualized dataflow layer between clients and the geolocation service. This scheme enabled the geolocation service with logical IP addresses based on the ID of the geospatial shard they covered – about 0.1 square kilometer. The scheme allowed dynamic scaling of resources during peak usage and contracting during off-peak – both essential for optimizing service cost.
Smooth continuity of service. The standards-based interface empowered assignment of ephemeral IP addresses to cars independent of the IP they were given by the carrier. This capability enabled smooth continuity of service as cars moved about. Interoperability and scalability were major objectives for this Proof of Concept.
4-Step Testing Process
Conceptually, collaborators used a simple 4-step testing process to determine an outcome for the Proof of Concept.
- Driving a car along a certain road in a geo-region defined as the Proof of Concept environment.
- Confirming the detected (uploaded) parking space through a GUI tool.
- Driving a car along with the same road (second round).
- Confirming the packet flow relating parking spot detection/notification (upload/download). Confirmation
entailed analysis of the tcpdump log.
Proof of Concept Results
Found free parking spaces. Tests confirmed the ability of the service to accurately detect free parking spaces along street sides. Accuracy was important because the visual presence of space is irrelevant for parking if it is caused by presence of temporary warning cones or space permanently reserved for emergency parking or no parking at all.
Distributed processing did not confuse vehicles. Test vehicles were in continuous motion, transmitting geospatial data to two different edge networks for local preprocessing, then on to central cloud servers, then back to the vehicles. The system of distributed processing worked smoothly irrespective of which vehicle was crowdsourcing or receiving data while moving within or between either edge network’s zone.
No service disruption while protecting privacy. The service operated continuously and protected privacy of each car’s data.
Can work at commercial scale. The test proved vision AI technology can scale to process uploads from many vehicles (M) at the same time to enable a reliable detection service for commercial deployment. It proved distributed simultaneous processing of two street segments by two different processes in two different edge networks. By induction, such partitioning that works for two segments will linearly scale to all street segments
Next Steps
Future iterations of this Proof of Concept may include testing exposure of cars to hazards, blockages, road construction, looking for specific signs, lane availability, multi-access edge computing low latency queuing, multicarrier and multi-edge providers, scaling size in cooperation with an OEM fleet, and so forth.
Toward this end, AECC invites the collaboration of member companies and other stakeholders who are interested in creating a global scheme for connected car services at massive scale. The AECC community includes key players in the automotive, high-speed mobile network, edge computing, wireless technology, distributed computing, and artificial intelligence markets. Our research is focused on validating new approaches to enable implementation of attractive, revenue generating use cases for connected vehicles.
If you are a stakeholder or potential stakeholder in the future of connected cars, we encourage you to learn more about becoming a member of the AECC. With collaboration among OEMs, MNOs, network/computing solutions, and app and service providers, the AECC can help with the progression of developing high-value digital services across the connected vehicle ecosystem. Get in touch to learn how you can help invent the future of connected cars and follow us on Twitter and LinkedIn to stay up to date.