
The AECC is dedicated to advancing global network architectures and computing infrastructure to address the data transfer requirements of the growing connected car services ecosystem. Our Proof of Concept (PoC) program focuses on real-world demonstrations showcasing AECC solutions’ efficacy in managing expanding data needs.
Contributing a PoC proposal is a great way to get involved with the AECC and our work in helping to shape the future of the global connected vehicle ecosystem. Any company can take part in our PoC program if at least one member company is part of the resulting PoC proposal. Explore our proposal library to see how AECC addresses current challenges in the connected vehicle realm.
If you’re interested in participating in a PoC proposal, please reach out to [email protected]
AECC Proof of Concept
Enabling Distributed Edges for HD Mapping
By Oracle Japan Corporation
Abstract
This proof of concept sought to confirm the AECC’s technical approach to enable data integration of distributed edge computing for HD mapping described in the AECC whitepaper “Operational Behavior of a High Definition Map Application”. Two scenarios were addressed: (1) Accessibility by creating a distributed edge testbed simulation to serve one million connected vehicles; and (2) Performance and Scalability by validating AECC’s concept on managing HD mapping data in a hierarchical manner. Results verified interoperability with multiple clouds (Oracle, AWS, Azure, GCP, and Wasabi) and up to 10X reduction in query latency using a sub-query component. Results also confirmed dynamic event management and the ability to optimize driving routes with an average processing time of less than 200 milliseconds. Performance with a single replica set of 2-5 servers syncing the data can provide ~100,000 transactions per second (TPS) for update requests with response time of sub-millisecond for single records and 2-3 milliseconds for multiple records when queried by a specifying area. Linear scalability improvements are achieved with additional replica sets.
Business Strategy
A primary use case for connected vehicles is high-definition mapping. The HD map is used for autonomous driving as it consolidates static and dynamic information such as vehicle position, and its relationship to other vehicles, pedestrians, and obstacles. The HD map is useful for ensuring accurate, safe operation of connected vehicles to protect passengers, vulnerable road users (including pedestrians, cyclists, skaters, road workers, etc.) and property. The temporal accuracy of HD maps is critical to provide safe vehicle operation.
Creating and distributing an HD map in hundreds of millions of connected vehicles is a massive challenge for integrating geographic data. Multiple global and regional stakeholders require many data transactions with high capacity and efficient processing to keep HD maps continuously relevant. Legacy systems are unable to perform these requirements at a global scale, so an affordable solution utilizing distributed computing for low latency and accurate regional HD map data is necessary to be effective for future mobility safety services.
Proof of Concept Objective
As a contributor member of AECC, Oracle sought to confirm the consortium’s technical approach for an HD map update use case category. Our proof of concept entailed two key performance metrics:
- Accessibility: Create a distributed edge computing testbed simulation as proposed by AECC to serve one million connected vehicles.
- Performance and Scalability: Validate the AECC’s concept to manage HD data in a hierarchical manner.
Scenario 1 – Data Accessibility
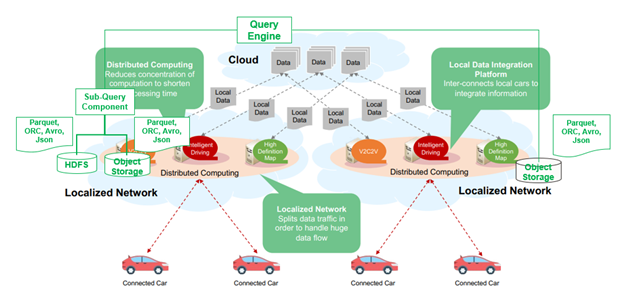
Our study simulated the AECC’s concept of “data offloading” at distributed edge computing locations and then tested the accessibility of this data. We analyzed how to improve the performance of integrated searches against big data parquet files and their placement in multiple cloud environments. For more efficient data processing, the study also tested the effect of having summary indexes use a subquery engine, considering the minimum and maximum values of each column per data block and do filtering and subtotal operations on data from senders. These are a subset of typical operations used to create and maintain HD maps at massive scale.
Simulated Data Offloading to Improve Accessibility
Scenario 2 – Performance and Scalability
Our study also simulated the AECC’s concept of “edge server selection,” which ensures that data is distributed, and subsequent data processing occurs at the sever where the data resides. This concept is for high-density data integration and processing – a mandatory requirement to manage, analyze, and optimize HD maps for connected vehicles. The study simulated numerous traffic events, such as traffic jams, traffic controls, hazardous road conditions, and so forth while linking them to the HD map at high speed. To do so, two different data management layers were used to manage dynamic and static information separately, and each layer was configured to scale out separately, depending upon the business requirements. To accelerate the performance, the spatial index is created for static information, in-memory grid technology is applied to the dynamic information layer, and the data processing is dispatched to the server in which the data resides.
To realize the HD Map service, it is necessary to keep managing various geospatial events and quickly deliver them to the moving vehicles that may be affected. Therefore, it is important to improve the performance by various ingenuity.
Proof of Concept Results
Scenario 1 – Data Accessibility
Functionality. Defined a single logical table unit on top of multiple files stored in the distributed places and ran queries against it.
Interoperability. Verified interoperability of the data storage systems with Oracle Cloud Infrastructure – Object Storage; AWS S3; Azure Blob Storage; GCP Cloud Storage and Wasabi Hot Cloud Storage (through AWS S3 compatibility).
Performance. One billion test data records were prepared and distributed across multiple servers, and query performance was measured with and without the sub-query component. Results show latency was reduced more than 10X with the sub-query component. The image below shows results as weighted averages of ten runs with a legacy system (orange/not used) versus the AECC scheme (blue/used).
Distributed Data Accessibility Improvement

Scenario 2 – Performance and Scalability
In this scenario, we tested a layered mechanism to manage HD Map data in a hierarchical manner. The study included assessments of scalability for data management layers and data distribution methods.
Dynamic event management. Registration / update / reference of various dynamic events on the map were conducted. Event data is distributed based on the consistent hash algorithm.
Route Optimization (as a data utilization workload) By considering the road structure and dynamic traffic situation, the study determined the optimal driving route for each vehicle. A single core with a heuristic-based algorithm can calculate and determine the optimum route, considering road width, traffic congestion, etc. with a processing time of less than 200 milliseconds.
Performance.
A single replica set of two to five servers syncing the data can provide:
- ~100,000 transactions per second (TPS) for update requests
- Several times bigger TPS for read/update mix
Response Time at peak load:
- Single record update: sub-millisecond
- Single record access: sub-millisecond
- Multiple records queried by specifying area: two to three milliseconds
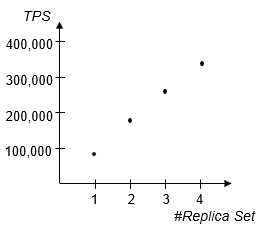
Good/Linear scalability by adding replica set
- Linear scalability is achieved when the client knows the replica set in which target data exists
More Replica Sets Enable Linear Scalability
Next Steps
The discussion and results presented above conclude Phase I of this proof of concept. Phase II will continue exploring optimal ways to enable distributed edge computing instances for HD mapping. Phase II will examine ways to distribute data based on agile locations of mobile vehicles, the addition of other related data sources, such as mobile devices like smartphones, tablets, and wearables.
Toward this end, AECC invites the collaboration of member companies and other stakeholders who are interested in creating a global scheme for HD mapping at massive scale. The AECC community includes key players in the automotive, high-speed mobile network, edge computing, wireless technology, distributed computing, and artificial intelligence markets. Our research is focused on validating new approaches to enable implementation of attractive, revenue generating use cases for connected vehicles.
If you are a stakeholder or potential stakeholder in the future of connected cars, we encourage you to learn more about becoming a member of the AECC. With collaboration among OEMs, MNOs, network/computing solutions, and app and service providers, the AECC can help with the progression of developing high-value digital services across the connected vehicle ecosystem. Get in touch to learn how you can help invent the future of connected cars and follow us on Twitter and LinkedIn to stay up to date.