
Deriving a New Architecture to Support the Data Impact of Connected Vehicle HD Mapping

Blog by: AECC President and Chairperson Ken-ichi Murata-san, AECC Directors Christer Boberg and Roger Berg
Seeing “architecture” and “map” in the same sentence might make one wonder why high-definition (HD) mapping needs more than a sheet of paper or a hi-resolution monitor. After all, a two-dimensional surface enables the presentation of 18 different types of maps. Some of these are helpful for human-controlled driving, such as street or resource maps. Most of us use electronic versions with a smartphone.
This blog is about something different: the notion that connected vehicles need a radically different kind of map, which the connected car industry calls an HD map. Its timely, continuous delivery needs resources. Even the emerging 5G wireless network is just a piece of what HD mapping requires to help operate connected vehicles on a global scale. For this reason, the Automotive Edge Computing Consortium (AECC) is helping to shape a new architecture that allows HD mapping to serve hundreds of millions of future connected vehicles.
What is an HD Map?
An HD map is not “just a map” with a single static layer of content shown in high definition. Its parameters tie with data required by a connected vehicle to fully automate all driving tasks with no human intervention. Typically, an HD map does not require a display monitor because its primary user is a machine. AECC’s assumption includes four types of interactive and dynamic HD mapping data, shown in Figure 1. Time is the dependent variable, gauging how often the data changes.
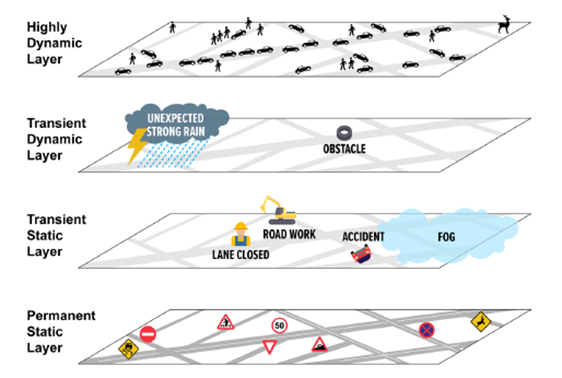
Figure 1. Data Layers of an HD Map
Permanent Static Layer is the essence of a regular static map. Its data changes at intervals of one day or longer, such as lanes, traffic signals, and the three-dimensional structure of a road.
Transient Static Layer data changes occur at intervals of less than several hours. It includes the position and state information of road work, lane closures, broken-down vehicles, accidents, and so forth.
Transient Dynamic Layer changes occur at intervals of less than several minutes. It includes the position and state information of obstacles such as fallen objects, illegally parked vehicles, trash, local weather such as unexpected heavy rain, and so on.
Highly Dynamic Layer changes occur at intervals of less than several seconds. It pertains to position and state information of pedestrians, vehicles, bicycles, motorbikes, and so forth.
Other definitions of HD mapping operate on different assumptions. The AECC’s definition focuses on useful and timely supplemental information for the HD map but not specifically on information that requires updates at time intervals of less than one second and 100% deterministic real time data delivery, which are used for automated driving control.
How HD Mapping Enables Assisted Driving
The blend of data from an HD map’s four layers enables the connected vehicle to know its precise position in relation to fixed and dynamic objects. The goal is clear: to safely get you to your destination without unnecessary delay or risk.
Like a “seeing-eye dog”, the HD map collects sensor data from on-board sensors in the vehicle system. These may include cameras and electronic control units (ECUs), radar sensors, laser scanners (LiDAR), and other systems.
The HD map is enriched with other external data, such as geospatial positioning via GPS, street maps, satellite imagery, accident reports, and nearby weather alerts and traffic flow.
The intended result of data fusion is to arm the connected vehicle system with precise, at-the-moment data essential for safe operations without human intervention. HD mapping will include close range (<20 centimeters) perception, ML analytics, and capable computation and wireless connectivity* to let the Advanced Driver Assistance System (ADAS) route navigation, and other applications for connected vehicle driving process and execute essential tasks faster than a human. This unique capability means that HD mapping will help improve the level of driving safety.
What the New Architecture Needs for Global Scale
The italicized words, “Capable computation and wireless connectivity,” are the crux for shaping a new HD mapping architecture. These elements are integral to HD mapping process flow (see Fig. 2), with missing technology dependencies necessary to scale deployment for hundreds of millions of connected vehicles globally.
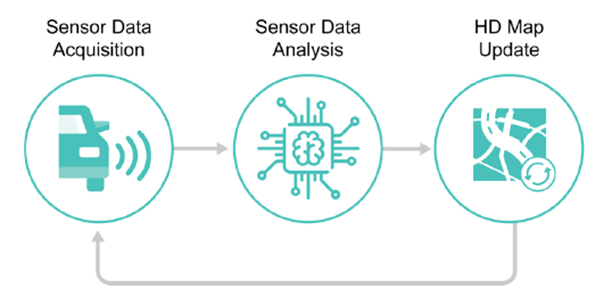
Figure 2. Expected Process Flow of an HD Map
The emerging architectural requirement is to support the incredibly massive data flows and processing required for HD mapping.
As described in the AECC’s vision whitepaper and Technical Report, the new architecture for HD mapping applications will facilitate standardization and interoperability for the connected car ecosystem. AECC’s concept for this architecture includes three key elements:
- Localized Network. By covering a limited number of connected vehicles in a certain area, a local network splits the large amounts of data traffic into reasonable volumes per area of data traffic between the vehicles and the cloud.
- Distributed Computing. Computation resources are geographically distributed within the vicinity of the localized networks’ terminations. This distribution reduces the concentration of computation and shortens the processing time needed to conclude a transaction with a connected vehicle.
- Local Data Integration Platform. Integration of local data by utilizing the combination of the localized network and distributed computation. By narrowing relevant information down to a specific area, data can be rapidly processed to integrate information and notify connected vehicles in real-time.
Looking into Data Volumes and Latency
Our next blog will illustrate the operational behavior of the HD mapping use case with projected data volumes and system latency. If you want to jump ahead, look at our white paper, Operational Behavior of a High Definition Map Application. The information provided thereby AECC is not meant to prescriptively define new standards to develop the underpinning technologies for HD mapping infrastructure. Instead, our focus is on helping stakeholders to specify dependencies and outcomes that inform industry collaboration within standards bodies. The takeaway value is a clarification of the indicator for evaluating technologies developed for HD mapping.
More information about AECC research is available in our General Principle and Vision white paper, and our recently-updated Technical Report, Driving Data to the Edge: The Challenge of Traffic Distribution. We also welcome collaboration by industry stakeholders as members of AECC research projects. To initiate an inquiry, please visit our website, https://aecc.org.